Unit 16 - Lidar, DTM interpolation¶
There is open LiDAR data for Norway available at hoydedata.no. Go to Download, choose region in map viewer and request data for download.
LiDAR data used in this unit can be found in sample dataset, in
geodata/lidar/laz folder. Data is stored in LAZ format
(compressed LAS format).
Data import¶
For importing LAS/LAZ data there are available two GRASS modules:
- r.in.lidar for importing point cloud data as raster map
- v.in.lidar for importing point cloud data as vector point map
Note
GRASS requires libLAS library for reading LAS data. For compressed LAS (LAZ) there is another dependency, a laszip library.
Basic metadata can be obtained by command line utility lasinfo
which is part of libLAS library.
lasinfo geodata/lidar/laz/32-1-514-136-15.laz
...
Min X Y Z: 590400.00 6655800.00 283.31
Max X Y Z: 591199.99 6656399.99 499.04
...
Vector import¶
Create a new mapset called lidar to save all the LiDAR data.
Let’s try to import selected tile into vector point map first. Flag -t skips creation of attribute table. The import process will be significantly faster. Another flag which will speed up the import process is -b. It skips building topology (which is not needed for point features anyway). Information about data SRS can be missing, projection check can be skipped by -o flag.
v.in.lidar -otb input=geodata/lidar/laz/32-1-514-136-34.laz output=las_32_1_514_136_34
Note that computational region is ignored when importing data using v.in.lidar.
Overall point density can be checked by v.outlier. Note that v.outlier is working in the current computation region(!). Computational region must be set based on imported data. Since building topology was skipped by -b flag, the map extent must be computed by scanning all points in input vector map. That is reason why g.region can run for a while.
g.region vector=las_32_1_514_136_34
v.outlier -e input=las_32_1_514_136_34
Estimated point density: 9.827
Estimated mean distance between points: 0.319
Note
Point density is calculated for map (square) unit.
Basic metadata can be printed by v.info (since no topology is built, the module must scan all features in the map):
v.info map=las_32_1_514_136_34
...
| Number of points: 4716789 Number of centroids: 0 |
...
| Map is 3D: Yes |
...
| Projection: UTM (zone 32) |
| |
| N: 6655799.99 S: 6655200 |
| E: 592799.99 W: 592000 |
| B: 315.87 T: 431.17 |
...
Raster import¶
Input point cloud can be imported by r.in.lidar into raster map. Flag -e extends current computational region to cover all imported points. Otherwise user needs to set up computational region by g.region. Spatial resolution for output raster map is defined by resolution option. By default, for cells with more points involved, the value is computed by mean value, see method option. Cells covered by no points will get NULL values assigned.
r.in.lidar -oe input=geodata/lidar/laz/32-1-514-136-34.laz output=las_32_1_514_136_34 resolution=1
Basic metadata about created raster map can be obtained by r.info.
r.info map=las_32_1_514_136_34
...
| N: 6655800 S: 6655200 Res: 1 |
| E: 592800 W: 592000 Res: 1 |
| Range of data: min = 315.92 max = 429.5867 |
...
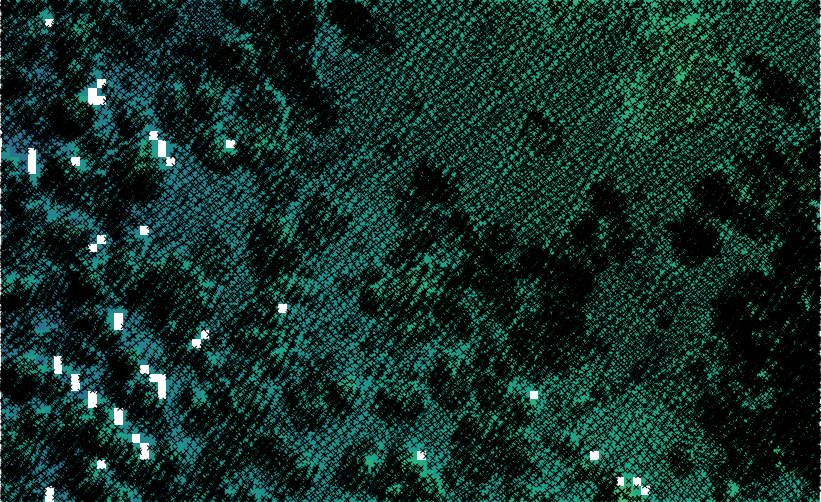
Fig. 97 Imported data as vector points. Raster map with 1m resolution in the background.
Filling gaps¶
There are several GRASS modules for filling gaps in raster maps like
r.fillnulls or r.fill.stats. The first module
is based on spline interpolation, the second fills gaps with
interpolated values using IDW. We will use the second module which
fill nulls rapidly compared to r.fillnulls. By
-k flag we ensure that original values will be kept. Only
cells with no-data value will be modified.
r.fill.stats -k input=las_32_1_514_136_34 output=las_32_1_514_136_34_no_gaps
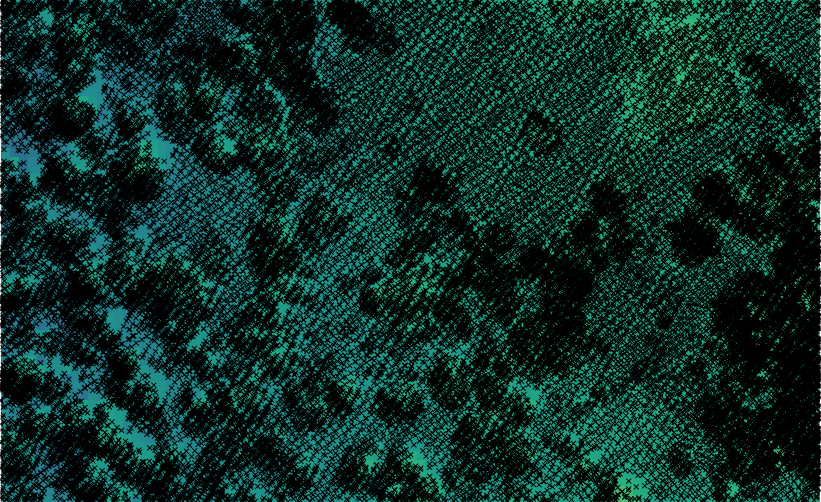
Fig. 98 Raster map filled by r.fill.stats.
Note
Note that only cells in given distance (8 pixels by default, see
cells option) are processed.
High resolution DTM¶
Digital Surface Model (DTM) is interpolated by v.surf.rst
using regularized spline with tension approximation. Output resolution
set to 0.5 meter. The computation can be really slow. You can turn
computation time to be more reasonable by running it in parallel, see
nprocs option (GRASS 7.4+ only).
g.region vector=las_32_1_514_136_34 res=0.5 -pa
v.surf.rst input=las_32_1_514_136_34 elevation=dtm_32_1_514_136_34 npmin=80 tension=20 smooth=1 nprocs=5
Tip
Try also to set higher npmin to reduce artifacts.
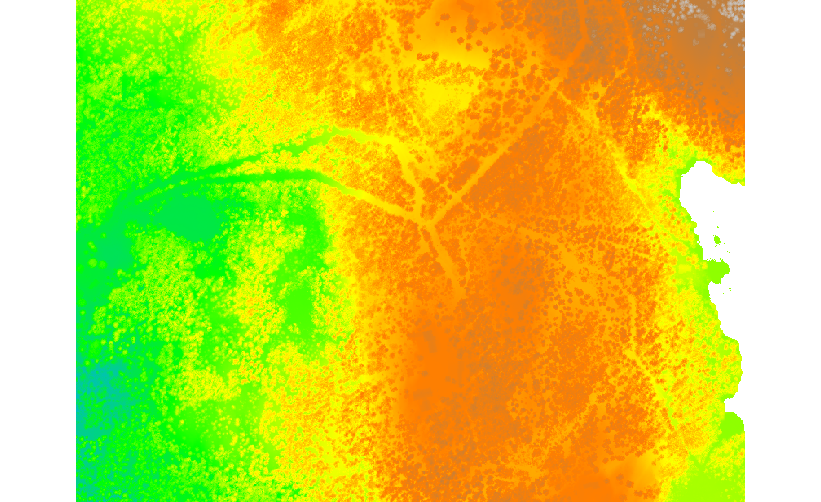
Fig. 99 Resultant DTM.
Note
Similarly can build Digital Terrain Model (DTM) from filtered terrain only points by edge detection.
The filter aims to recognize and extract attached and detached object (such as buildings, bridges, power lines, trees, etc.) in order to create a Digital Terrain Model. (source: v.lidar.edgedetection manual page) Example of simple workflow based on v.lidar.edgedetection, v.lidar.growing and v.lidar.correction below. Note that edge detection is usually a time and RAM consuming task, and the result is not perfect.
v.lidar.edgedetection input=las_32_1_514_136_34 output=edge_32_1_514_136_34 ew_step=8 ns_step=8 lambda_g=0.5
v.in.lidar -otb input=geodata/lidar/laz/32-1-514-136-34.laz output=las_32_1_514_136_34_first return_filter=first
v.lidar.growing input=edge_32_1_514_136_34 output=grow_32_1_514_136_34 first=las_32_1_514_136_34_first
v.lidar.correction input=grow_32_1_514_136_34 output=corr_32_1_514_136_34 terrain=terr_32_1_514_136_34