Geodata v různých souřadnicových systémech¶
Důležité
Tento postup se od verze GRASS 7.0.2 výrazně zjednodušuje. GRASS od této verze poskytuje nástroj, který nejen vstupní geodata naimportuje do aktuálního mapsetu, ale také provede jejich transformaci v případě, že se souřadnicové systémy vstupních geodat a dané lokace liší. Jedna se moduly r.import a v.import.
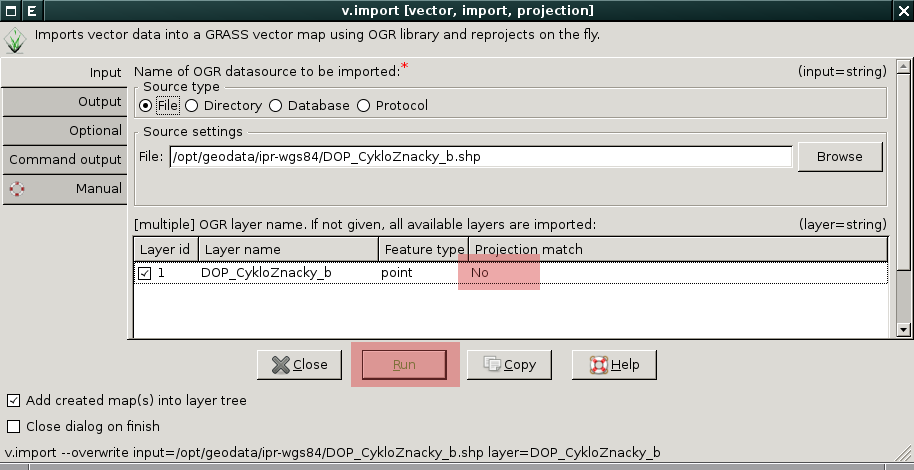

V případě, že se souřadnicový systém vstupních geodat a dané lokace
liší (viz Projection match na import-no-proj)
nelze import provést přímo. Postup vyžaduje hned několik kroků.
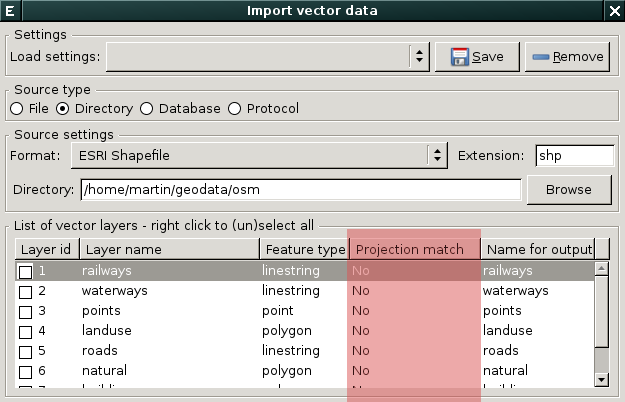
Vstupní data nejsou v souřadnicovém systému lokace. Je nutné je transformovat.
Postup¶
- Vytvořit novou lokaci se souřadnicovým systémem vstupních geodat.
- Do této nové lokaci se přepnout a geodata tam naimportovat.
- Dále se vrátit opět do původní lokace a do této naimportovaná geodata transformovat.
Vytvoření nové lokace¶
Z menu spusťte průvodce tvorby lokace, novou lokaci můžete vytvořit více způsoby, nejrychlejší je v tomto případě tvorba na základě vstupních geodat. Po vytvoření nové lokace se objeví dialog, který umožňuje se do této lokace přepnout.
Přepnutí do nově vytvořené lokace.
Potvrzení aktuální lokace.
Import geodat do nové lokace¶
Geodata do nově vytvořené lokace naimportuje standardní cestou, položka Projection match by měla obsahovat
již hodnotu Yes.
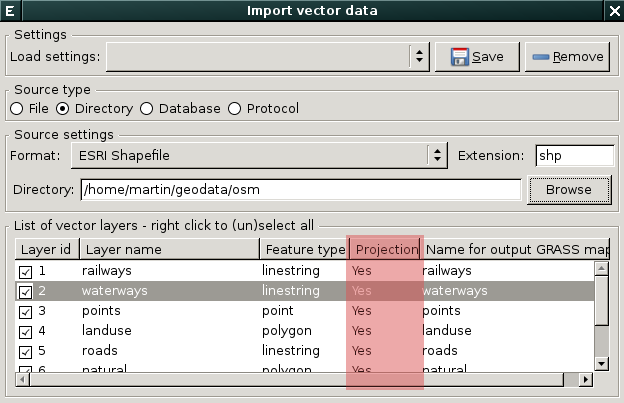
Souřadnicový systém dat a lokace se shoduje.
Po importu dat se vrátíme do původní lokace .
Dialog změny lokace a mapsetu.
Aktuální nastavení lokace můžeme volitelně uložit do souboru s projektem (tzv. workspace file).
Dialog pro uložení projektu (workspace).
Poté se objeví dialog, který potvrzuje, že aktuální lokace je opět ta cílová.
Dialog potvrzující přepnutí do původní lokace a mapsetu.
Transformace dat do cílové lokace¶
Transformovat rastrová data umožňuje modul r.proj dostupný z menu , podobně pro vektorová data existuje v.proj ().
Následuje příklad pro transformaci vektorových dat.
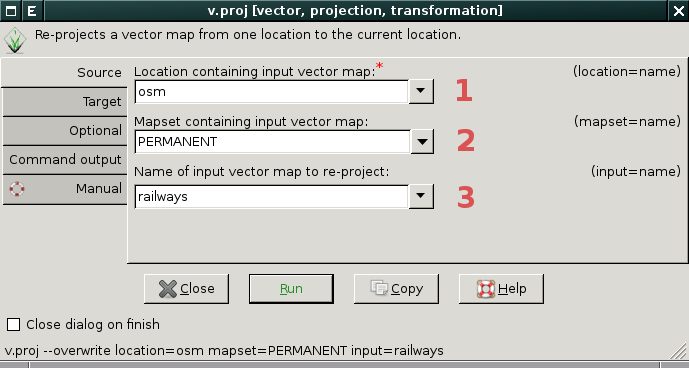
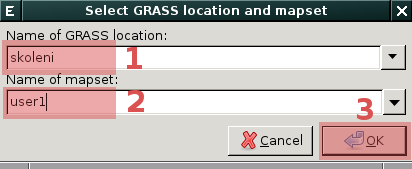
V záložce Source vybereme lokaci (1) a
mapset (2), který obsahuje vstupní data, dále
vstupní vektorovou mapu (3). Pokud by lokace
byla umístěna v jiném adresáři, tak je potřeba jej
definonat pomocí parametru dbase.
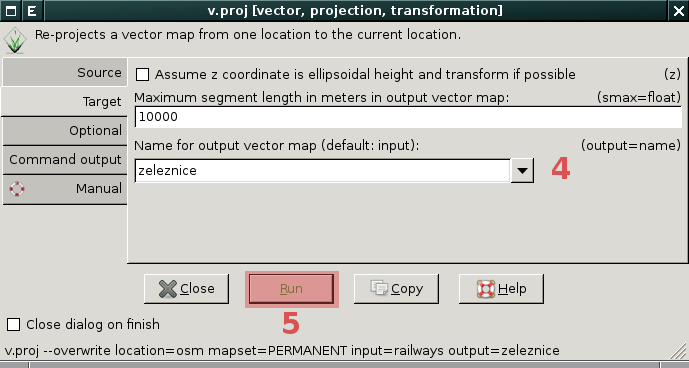
Případně můžeme v záložce Target zvolit název pro výstupní mapu (4). Transformaci spustíme (5).
Po úspěšné transformaci se vytvořená vrstva automaticky přidá do správce vrstev a zobrazí v mapovém okně.