Working with Lidar data¶
Import data¶
LAS format¶
For importing LAS data are available two modules:
- r.in.lidar which creates a new raster map
- v.in.lidar which creates a new vector point map
Note
GRASS must be compiled with support for libLAS library.
Example:
r.in.lidar -oe input=pr_TANV37_5g.laz output=pr_TANV37_5g resolution=1
v.in.lidar -ot input=pr_TANV37_5g.laz output=pr_TANV37_5g
Note
Flag -o must be used in the case since input data
miss information about spatial reference system. Basic
metadata about imported data can be obtained by lasinfo
command which is part of libLAS library.
lasinfo pr_TANV37_5g.laz
...
Min X Y Z: 531815.05 5625597.55 925.35
Max X Y Z: 534548.84 5627727.26 1292.54
Spatial Reference: None
Flag -t skips creation of attribute table. The
import process will be significantly faster. You can also
avoid building topology by -b flag.
In the case of r.in.lidar is also used flag
-e which extends current computational region to
cover all imported points. Otherwise user needs to set up
computational region via g.region as in the case
of r.in.xyz, see section bellow. Spatial
resolution for output raster map is defined by
resolution option. Note that computational region is
ignored when importing data using v.in.lidar.
Basic metadata about imported created raster maps can be obtained by r.info, or v.info in the case of vector maps.
r.info map=pr_TANV37_5g
...
| Data Type: FCELL |
| Rows: 2131 |
| Columns: 2734 |
| Total Cells: 5826154 |
| Projection: UTM (zone 33) |
| N: 5627728 S: 5625597 Res: 1 |
| E: 534549 W: 531815 Res: 1 |
| Range of data: min = 925.355 max = 1292.47 |
...
v.info pr_TANV37_5g
...
| Number of points: 3736392 Number of centroids: 0 |
| |
| Map is 3D: Yes |
| Number of dblinks: 0 |
| |
| Projection: UTM (zone 33) |
| |
| N: 5627727.26 S: 5625597.55 |
| E: 534548.84 W: 531815.05 |
| B: 925.35 T: 1292.54 |
...
XYZ data¶
XYZ data can be imported into raster map using r.in.xyz command. The command must be run in two steps:
- First run to get region extent, flags
-sg. Then use g.region to set the region for import. - Second to perform import, see example bellow.
# 1a. get region extent
r.in.xyz -sg input=TANV37_5g.xyz out=TANV37_5g separator=space
n=-974000.01 s=-976000.01 e=-657499.99 w=-660000.05 b=925.35 t=1292.54
# 1b. set region and resolution (flag -a to align based on resolution)
g.region -a n=-974000.01 s=-976000.01 e=-657499.99 w=-660000.05 b=925.35 t=1292.54 res=1
# 2. perform import
r.in.xyz input=TANV37_5g.xyz out=TANV37_5g separator=space
Raster binning and classification¶
The input files are classified to the classes bellow:
- ground (postfix
_g) - vegetation (postfix
_v) - building (postfix
_b)
First we import the input files (output resolution will be define by
resolution regardless computational region settings):
r.in.lidar -o input=pm_TANV37_b.laz output=pm_TANV37_b resolution=3 method=mean
r.in.lidar -o input=pm_TANV37_g.laz output=pm_TANV37_g resolution=3 method=mean
r.in.lidar -o input=pm_TANV37_v.laz output=pm_TANV37_v resolution=3 method=mean
Tip
Raster map resolution can be checked by r.info command.
Tip
In the case that input data include classified
points (can be check by lasinfo command) you can
use class_filter and
return_filter of r.in.lidar.
The composite map can be created by r.mapcalc (note that we need to define computational region based on import maps before running the command):
g.region raster=pm_TANV37_b,pm_TANV37_g,pm_TANV37_v -p
r.mapcalc "pm_TANV37_classes = if(!isnull(pm_TANV37_v), 2, if(!isnull(pm_TANV37_g), 1, if(!isnull(pm_TANV37_b),3, null())))"
We also apply custom color table using r.colors
(rules in Define tab):
1 220:220:180
2 0:180:0
3 150:0:0
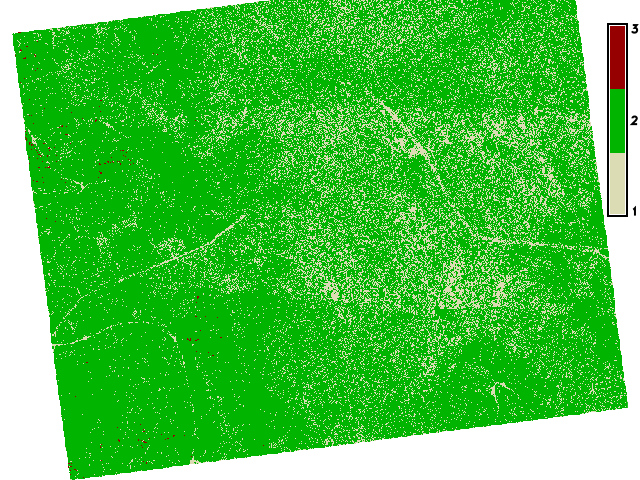
Fig. 37 Raster classification.
High resolution DEM¶
First we import data into vector point map by v.in.lidar (we skip creating attribute table):
v.in.lidar -t -o input=pr_TANV37_5g.laz output=pr_TANV37_5g
We can also check the point overall point density using v.outlier:
v.outlier -e input=pr_TANV37_5g
Estimated point density: 0.6418
Estimated mean distance between points: 1.248
DEM will be interpolated (v.surf.rst using regularized spline with tension approximation) with resolution 0.5 meter, also slope and profile curvature map will be created.
g.region vector=pr_TANV37_5g res=1 -pa
v.surf.rst input=pr_TANV37_5g elevation=dem37 slope=slope37 pcurv=pcurv37 npmin=80 tension=20 smooth=1
Tip
Set higher npmin to reduce artifacts from segmentation visible on slope and curvature maps (will be much slower!):
Tip
It can be also useful to set mask on areas without measured
data. Convex hull created by v.hull or composed
orthophoto map can be used for this purpose. The mask can be
specified by r.mask command (note that the mask
will be created only inside computational region), or simple
define by mask option of v.surf.rst.
v.hull input=pr_TANV37_5g output=mask37 -f
r.mask vector=mask37
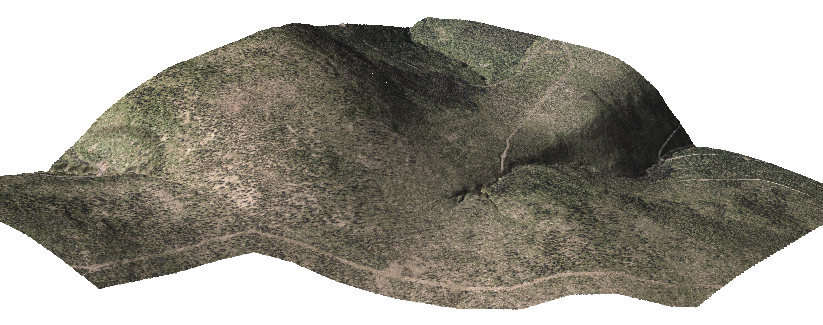
Fig. 38 Example of visualization in 3D, draped orthophoto over created DEM.